")
")
")
")
")
")
")
")
")
")
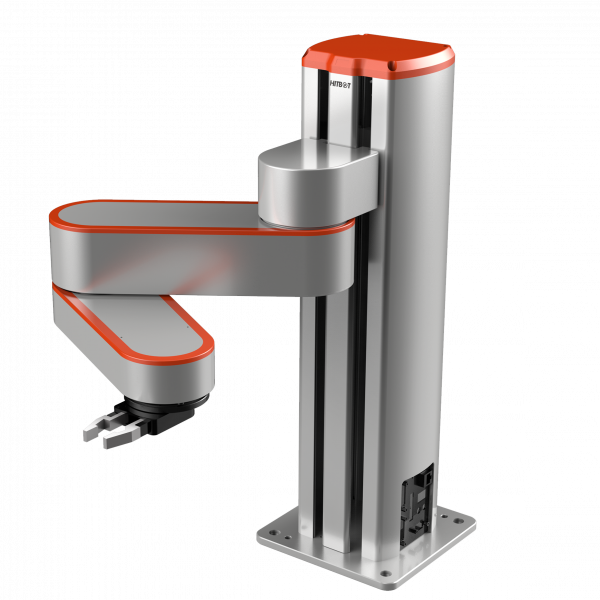





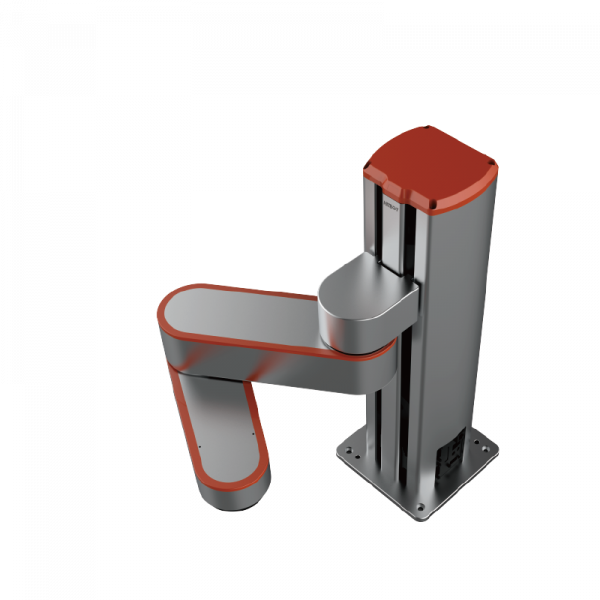
HITBOT Z-Arm-2442 là cánh tay robot SCARA cộng tác (Collaborative SCARA Robotic Arm), được thiết kế để tối ưu hóa lắp ráp, xử lý vật liệu và tự động hóa công nghiệp. Với tải trọng cao, tốc độ nhanh và độ chính xác vượt trội, Z-Arm-2442 phù hợp với các ngành điện tử, cơ khí, sản xuất tự động và logistics.
TÍNH NĂNG NỔI BẬT
Thiết kế SCARA linh hoạt – Cánh tay robot có cấu trúc tối ưu cho các tác vụ gắp, lắp ráp và vận chuyển trong dây chuyền sản xuất.
Tải trọng cao, phạm vi hoạt động rộng – Đáp ứng nhu cầu gắp, di chuyển vật thể lớn và nặng một cách chính xác.
Tốc độ cao, độ chính xác tuyệt đối – Cải thiện hiệu suất sản xuất với hệ thống điều khiển tiên tiến.
Tích hợp AI & IoT – Hỗ trợ giám sát và điều khiển từ xa, giúp tối ưu hóa hiệu suất làm việc.
Lập trình dễ dàng, tương thích cao – Hỗ trợ nhiều giao thức điều khiển, dễ dàng kết nối với PLC, robot cộng tác và hệ thống tự động hóa.
Tích hợp với nhiều thiết bị ngoại vi – Kết nối nhanh chóng với gắp kẹp điện, cốc hút chân không, cảm biến và camera AI.
Tiết kiệm năng lượng, giảm chi phí vận hành – Hoạt động bền bỉ với mức tiêu hao năng lượng thấp.
Ứng dụng đa lĩnh vực:
Lắp ráp linh kiện điện tử, cơ khí;
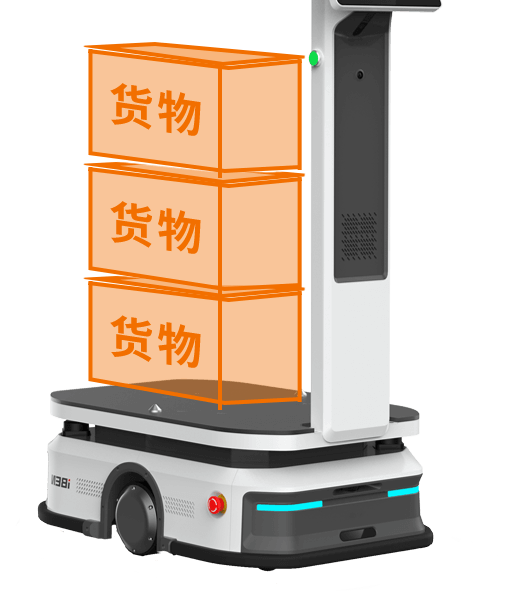
Xử lý vật liệu & đóng gói tự động;
Ứng dụng trong robot cộng tác (Cobot);
Kiểm tra chất lượng sản phẩm – Kết hợp với hệ thống camera AI để phát hiện lỗi sản phẩm;
Ứng dụng trong ngành y tế & sản xuất dược phẩm.
THÔNG SỐ KỸ THUẬT CƠ BẢN
Hành trình trục Z: 240mm (Có thể tùy chỉnh chiều cao)
Tốc độ tuyến tính: 1255,45mm/giây (tải trọng 1,5kg) 1023,79mm/giây (tải trọng 2kg)
Độ lặp lại: ±0,03mm
Tải trọng tiêu chuẩn: 2kg
Tải trọng tối đa: 3kg











Đánh giá
Chưa có đánh giá nào.